|
Lanke Frank Tarimo Fu I'm a PhD student in the Dynamic Robot Systems Groups at the University of Oxford, supervised by Prof Maurice Fallon. My research is on multi-sensor fusion for robotics with an emphasis on camera-LiDAR calibration using gradient-based optimization. Previously, I worked on multi-sensor tracking and prediction at Oxa |

|
ResearchI'm interested in deep learning, differentiable optimization, factor graphs, and projective geometry. Most of my research is about spatially aligning a camera image and a LiDAR pointcloud using either deep-learned, or hand-crafted features. |
|
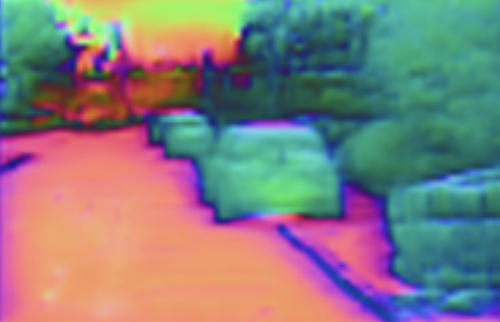
DiffVoxCalib
Lanke Frank Tarimo Fu, Maurice Fallon Conference on Robot Learning, 2023 Batch differentiable pose alignment enables efficient self-supervised training of aligned LiDAR and Camera features. This approach is capable of zero-shot transferring to new sensors and environments, retrieving calibration parameters with centimeter accuracy. |
|
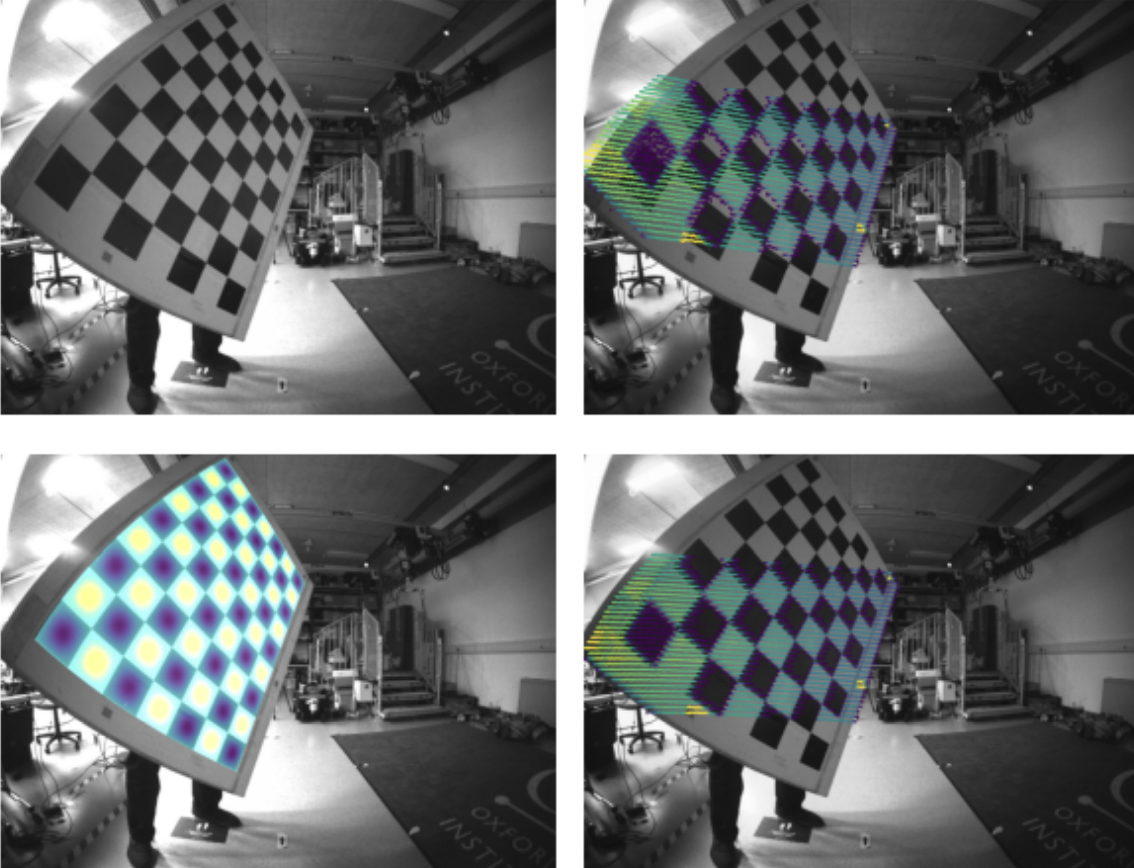
DiffCal
Lanke Frank Tarimo Fu, Nived Chebrolu, Maurice Fallon IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 Approximating the checkerboard pattern with a continuous function enables aligning the LiDAR point cloud to the camera image using gradient-based optimization. |
Reading |

|
Zen Mind, Beginner's Mind
The eternal practice is the enlightenment. |
|
This webpage is adapted from Jon Barron's site. |